|
|
You are here: Foswiki>CdiDocs Web>DetailedTechInfo>GripForceUserNotes (02 Dec 2024, BenDugan)Edit Attach
Grip Force User Notes
Getting Started
To get started using the grip device with a 932 interface:- connect the grip force device to a long optical bundle extension
- connect the bundle extension to the 932 interface
- (do not start out by connecting the grip force device directly to the 932)
- use the knob to select Autoconfigure
- this should narrow the options to USB, SERIAL, TTL ONLY, and BACK.
- choose USB for starters, then choose HID JOYSTICK
- if the USB indicator in the top left is blinking, make sure you have a USB cable connected to the computer
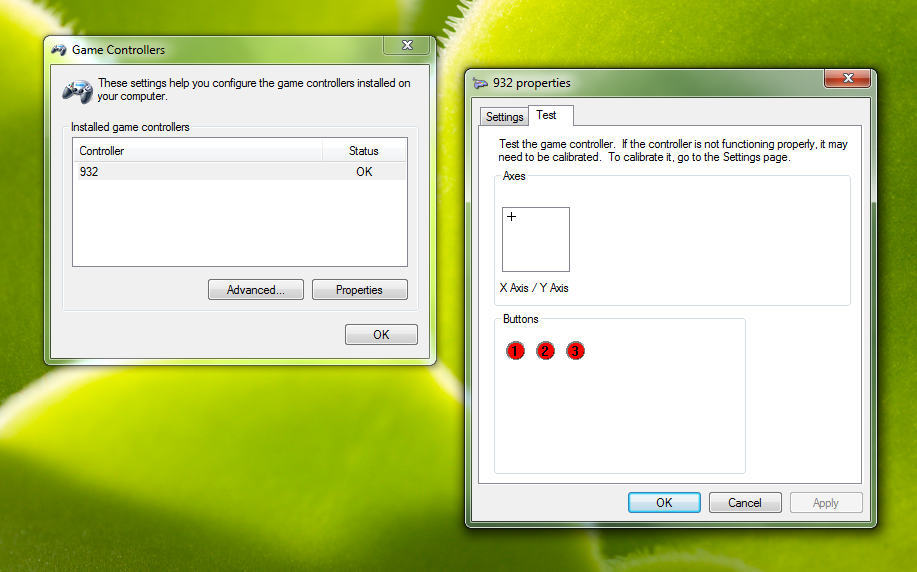 This display will let you confirm that the cursor moves up and down when you squeeze a one axis grip force device. It does not give you quantitative information, but just lets you check that things are basically functioning. And you should be able to confirm that the signal is not behaving in a saturated way: that is, that it tends to move any time force is increased or decreased.
This display will let you confirm that the cursor moves up and down when you squeeze a one axis grip force device. It does not give you quantitative information, but just lets you check that things are basically functioning. And you should be able to confirm that the signal is not behaving in a saturated way: that is, that it tends to move any time force is increased or decreased.
Scope
The "scope" of gamepad/joystick data is not system-wide they way mouse and keyboard data are. This brings advantages and disadvantages. It it easy to get keyboard data, but hard to take over the keyboard exclusively (keeping other applications from accessing it) for example. With joystick data you need to connect the joystick to your program, and then you can read its output.A Python Example
For our testing we use python almost exclusively now. This program gf_test.py can help you get started collecting data from the grip force device. To run it you'll need python3 installed and also pygame. Once you have this running you can use it to create a quick approximate force calibration by- record the resting (no force) output signal -- this becomes P0
- record the signal at max force (easily felt with a 100N spring set) -- this becomes P1
Matlab, Psychophysics Toolbox, PsychoPy, etc.
Most programs used for psychometrics can read generic joystick data but we are not expert users of any of them. Please contact us if you are struggling with any of these and we will try to help.Changing the springs
These instructions apply to the -V3 version of the grip force devices. Please contact us if you want to change the springs in your -V2 version device. Remove the screw and capture plate from the "tip" end of the grip device (the end which is further from the optical bundle): Then rotate the handle out slowly from the body until you can slide it out fully. The springs will fall out and you can reverse the process to install the new ones.
Then rotate the handle out slowly from the body until you can slide it out fully. The springs will fall out and you can reverse the process to install the new ones.
See Also
- TethyxUserNotes - has some useful information about the USB data scaling and the serial (RS-232) output mode


| I | Attachment | Action | Size | Date | Who | Comment |
|---|---|---|---|---|---|---|
| |
game_controller_disp.png | manage | 293 K | 18 May 2021 - 21:37 | BenDugan | |
| |
gf_test.py.txt | manage | 5 K | 13 Sep 2021 - 21:15 | BenDugan | |
| |
spring_change_1.png | manage | 412 K | 02 Dec 2024 - 20:39 | BenDugan |
{kind=link}
{kind=link}
Edit | Attach | Print version | History: r3 < r2 < r1 | Backlinks | View wiki text | More topic actions
Topic revision: r3 - 02 Dec 2024, BenDugan
Ideas, requests, problems regarding Foswiki? Send feedback